| YK-101横切机机械手说明书 |
| 发布日期:2022/3/25 13:43:00 点击数:1394 次 |
 |
无锡海利达自动化仪器厂YK-101触摸屏控制系统使用说明书(横切机机械手版)一、概述 YK-101控制系统为全数字触摸式控制系统,该系统采用高性能芯片.7寸液晶显示屏.触摸屏等高数字化产品。外观独特,界面新颖,操作简单,抗干扰能力极强。现已广泛用于塑料制袋机、横切机、全自动无纺布制袋机.全自动编织袋制袋机、圆织机等领域。 本系统输入16个点(包括2路高速测速端口),输出16个点,外加4路模拟量输出。可同时控制主电机(三相异步电机)送料电机(伺服电机或步进电机),放料电机(直流电机或三相异步电机),实现真正意义上的三个电机同步运行。即全自动加速功能,主机速度和后放料速度数据同时换算后速度自动分配。
二、简介 English/中文:中文和英文界面切换按键。
系统设置:按此键输入正确的密码,方可进入。
三、主页 长度设定:显示制袋所设定长度,单位:毫米(也可以当按键直接调节长度) 机械手:点击进入机械手参数界面。 计数/清零:单批次累计到一批个数结束时,个数自动归零;按“计数/清零”键清零清个数。 批数/清零:一批结束后,批数加“1”, 总数/清零:个数每加一个,总数加“1”;按“总数/清零”键清零总数。 空白/深色/浅色:三种状态切换。 空白:指光电忽略色标光电传感器信号; 深色:指跟踪印刷制品时,以深颜色的色标点为跟踪点; 浅色:指跟踪印刷制品时,以浅颜色的色标点为跟踪点。 寻标:当‘寻标’键选择“深色/浅色”时按此键,伺服(步进)电机一直转到深色的色标点自动停转时,设置为“追深”;伺服(步进)电机一直转到浅色的色标点自动停转时,设置为“追浅。 当‘寻标’键选择“空白”时,按此键无效 点进:在停止状态下,手动伺服(步进)电机正转。 点退:在停止状态下,手动伺服(步进)电机反转,在运行状态下此键变为“补数”,按此键计数减1。 复位:系统不能正常工作时,按此键程序重新启动,也可以做紧急停机用。 运行:按此键,主机正常运行。(长按3秒左右) 停止:按此键,霍尔开关GK1检测到高位停机信号;主机自动停机。 状态显示:运行/停止/不在高位/暂停/脱标/不在原点,六种状态切换显示。 运行:按启动键后显示“运行”。 停止:通电后一直显示“停止”。 不在高位:变频主机启动时未在高位时,显示“不在高位”。
暂停:当机型选择“暂停”时一批结束停机N秒后主机自动开机。 不在原点:运行过程中,机械手回原点未回到原点时,显示“不在原点”。
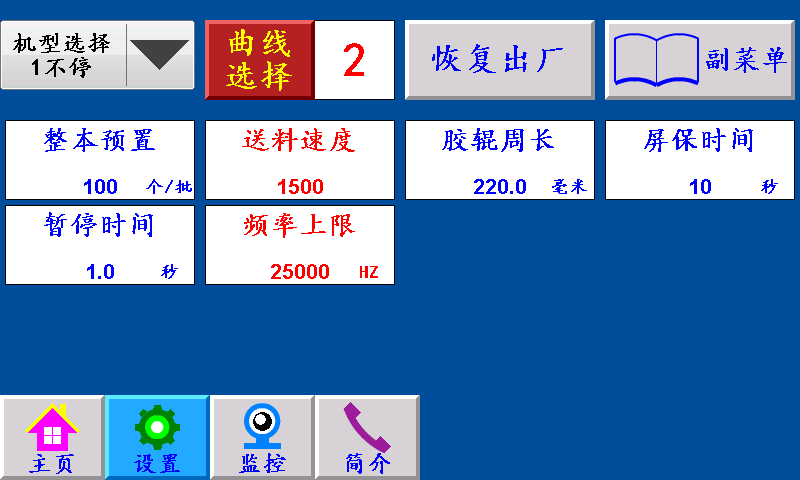
四、设置 不停/暂停/停机:“不停”:一批结束主机不停,继续正常工作。 “暂停”:一批结束主机暂停,停到暂停时间结束,主机自动开机。 “停机”:一批结束主机自动停机后不再运行,手动按启动键方可运行。 恢复出厂:按此键恢复出厂设置(慎用)。 副菜单:点击此键进入副菜单界面。 整本预置:一批设定的个数,提前5个报警。单位:个 暂停时间:当机型选择暂停,一批结束后主机自动停机所设定的时间。 送料速度:伺服(步进)电机的加减速时间,设定越大,伺服(步进)电机起步越快。 频率上限:伺服(步进)电机的最高转速,设定越大,伺服(步进)电机的转速越快。 胶辊周长:伺服(步进)电机带动橡胶辊转一圈的长度。 曲线选择:1~9,步进电机默认1,伺服电机默认6
屏保时间:主机运行状态下,在主界面停留此时间进入屏保状态。(设置0则屏保无效)
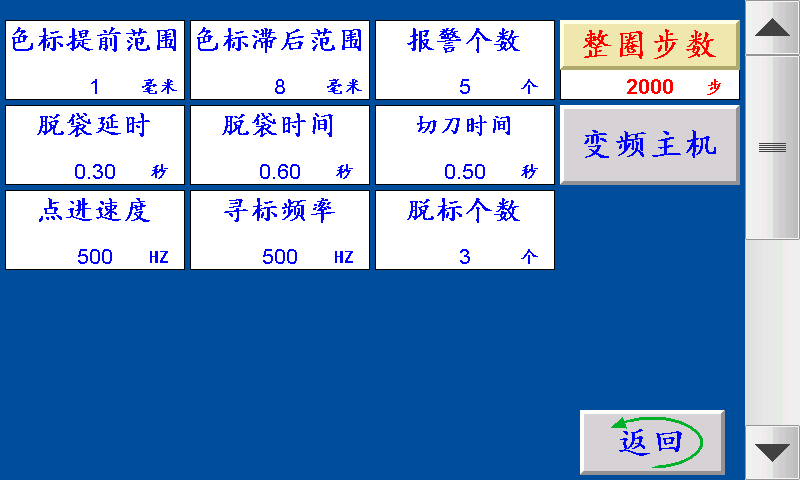
五、副菜单 色标范围:制作彩色制品时,伺服(步进)电机以恒定的速度寻找色标点的范围(即色标光电在『长度—设定的色标范围长度』范围内寻找色标,寻至『长度+设定的色标范围长度』。 色标提前范围:制作彩色制品时,伺服(步进)电机在料送结束之前,提前以恒定的速度寻找色标。 脱袋时间:一批结束后延时“脱袋延时”的时间后脱袋信号输出,时间结束后断开。 报警个数:一批结束前提前N个报警。 点进速度:伺服(步进)电机的点进/点退时的速度,设定越大,伺服(步进)电机的转速越快。 寻标频率:伺服(步进)电机追色标时的速度,设定越大,伺服(步进)电机的转速越快。 脱标个数:设定N个,制作彩色制品时,跟踪N次色标点,跟踪不住自动停机。 整圈步数:伺服(步进)电机转一圈所需要的脉冲个数。 切刀时间:料送结束后,气动切刀输出“切刀时间”后,切刀信号关闭。 变频主机/气动切刀: 变频主机:切刀使用变频控制,由高位信号控制切刀关闭。
气动切刀:切刀使用气动控制,由切刀时间控制切刀输出时间。
六、机械手设置界面 机械手速度:伺服(步进)电机的加减速时间,设定越大,伺服(步进)电机起步越快。 机械手频率:伺服(步进)电机的最高转速,设定越大,伺服(步进)电机的转速越快。 曲线2选择:1~9,步进电机默认1,伺服电机默认6 回原点:停机状态下,机械手回到原点左限。 定长:停机状态下,计算机械手前后限位所需要的总脉冲数。 前进:在停止状态下,手动伺服(步进)电机正转。 后退:在停止状态下,手动伺服(步进)电机反转。 吐料长度:每次送料时,送料伺服(步进)电机先送吐料长度。 拖料长度:机械手后退松料该长度后,机械手夹子打开。 松料长度:机械手夹子打开后,机械向后移动拖料长度。 闭夹延时:吐料结束后,闭夹电磁阀延时“闭夹延时”时间后闭夹信号输出。 闭夹时间:闭夹延时时间结束后,闭夹电磁阀输出闭夹时间。 寻原点提前范围:机械手回原点左限时,提前该脉冲数进入寻标回原点左限。 寻原点滞后范围:机械手走回原点左限走定长后,继续走滞后范围寻原点左限。 回原点延时:机械手拖料送料后,回原点时先延时该时间后再回原点。
前后限位距离:机械手限位之间的距离。
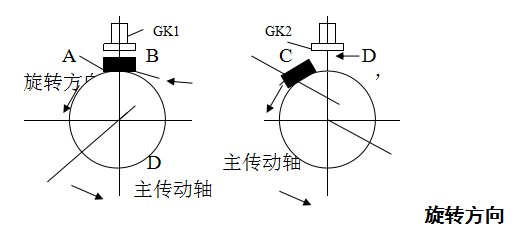
七、输入传感器逻辑图关系
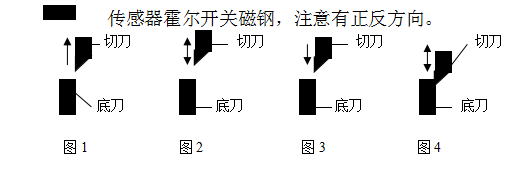
A ,开始送料位置,此时切刀向上运动,刚离开底刀,步进电机可顺利地将被制料送出(图1)。 B, 高位停机位置,此时切刀向上运动,至最高点,停机,可使烫切刀不致于破坏被制料(图2)。 C ,拖料极限位置,此时切刀向下运动,刚到底刀处,此时步进电机不能再送料,否则,被制料会堵于刀内或拉断(图3)。 D, 整本脱袋位置,此时切刀向下运动,刚到最低点,整本机在此位置将拉针拔出,再把整本制品推出(图4)。
A’取样逻辑位置,位于A与D之间。 八、外接附件 1、 霍尔开关 红:+24V;黑:GND;黄:输入信号 2、 色标光电 红:+24V;黑:GND;白或绿:输入信号 3、 蜂鸣器 红:+24V;黑:蜂鸣器信号
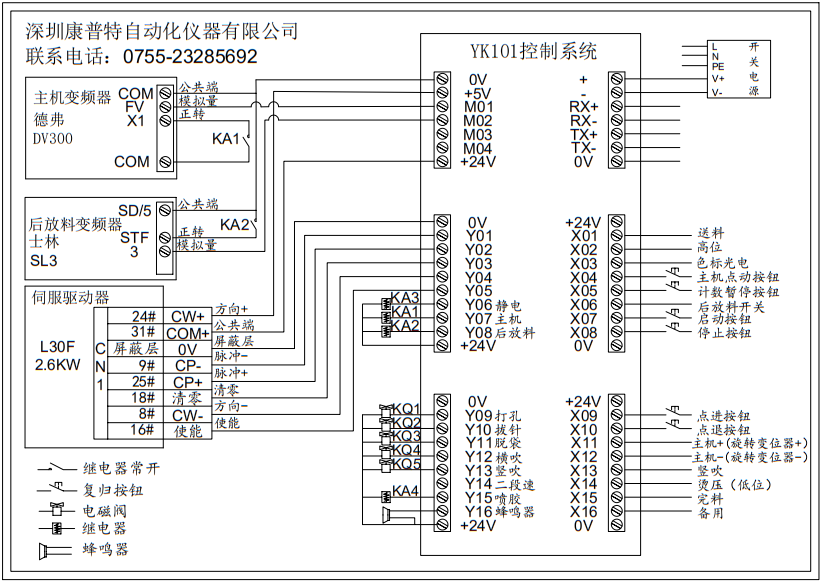
九、外部接线 输入信号接线端子(0V) 输出信号接线端子(0V)
01,+(DC24V接入) 01,0V 02,- 02,+5V 03,RX+ 03,M01 主机模拟
04,RX- 04,M02 放料模拟 06,TX- 06,M04 备用模拟 07,0V 07,+24V
01,+24V 01,0V 02,X01 02,Y01 (CP-脉冲) 03,X02 GK2高位 03,Y02 (CP+脉冲) 04,X03 色标光电 04,Y03 伺服清零 05,X04 05,Y04 机械手脉冲 06,X05 06,Y05 (CW-方向) 07,X06 07,Y06 (CW2方向) 08,X07 外接启动 08,Y07 主机输出信号(0V) 09,X08 外接停止 09,Y08 10,0V 10,+24V
01,+24V 01,0V 02,X09 外接点进 02,Y09 03,X10 外接点退 03,Y10 04,X11 04,Y11 脱袋输出(0V) 05,X12 05,Y12 06,X13 06,Y13 07,X14 07,Y14 闭夹输出(0V) 08,X15 前限位 08,Y15 09,X16 后限位 09,Y16 蜂鸣器(0V)
10,0V 10,+24V
|