| YK-101自动冲口机英文版 |
| 发布日期:2022/4/7 14:59:00 点击数:8882 次 |
 |
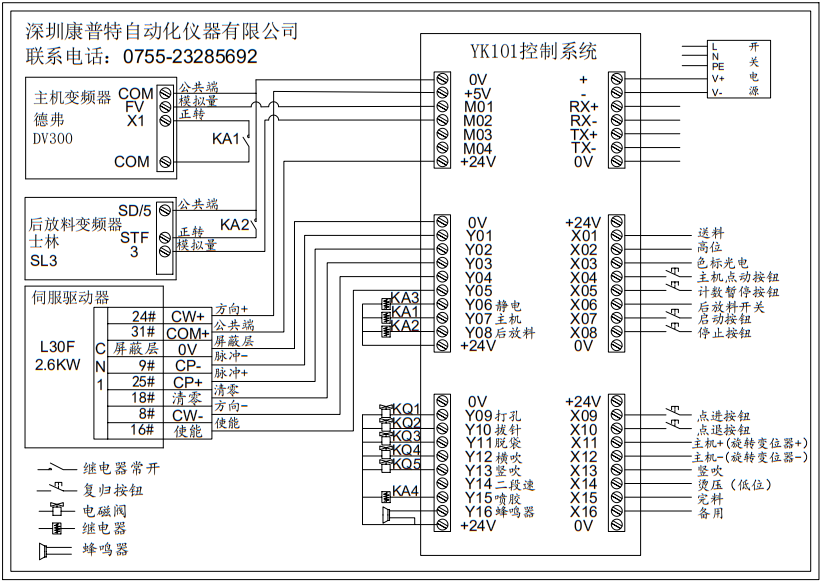
YK-101 Touch screen control system User’s Manual (Cross cutting, Zhejiang limit) Shenzhen Kangpute AUTO INST co.LTD Phone: 86-0755-23285692 I. Overview The YK-101control system and touch control system is digital, the system uses the high performance chip.7 inch LCD touch screen etc .. The high number of products. The appearance of unique, innovative interface, simple operation, strong anti-interference ability . It is now widely used in plastic bag making machine, cutting machine, automatic Non-woven bag machine. Automatic woven bag making machine, circular loom, etc.. The system input 16 points (including 2 high speed port), the output of 16, plus 4 analog output. Can control the main motor (three-phase asynchronous motor) (feeding motor servo motor or the step motor), a feeding motor (DC motor or three-phase asynchronous motor), the realization of the three motor real synchronous operation. The automatic acceleration, speed and feeding speed data at the same time after conversion speed automatic distribution. II. Information 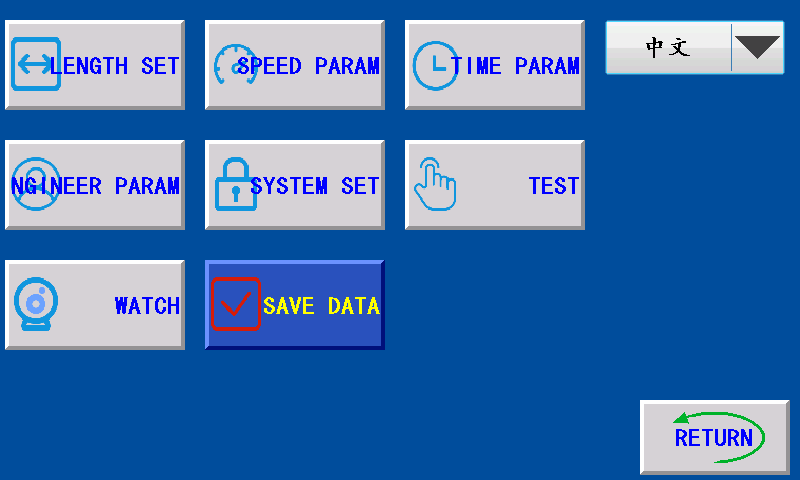 中文/English:Chinese and English interface switching button. LENGTH SET:Press this key to enter the length parameter setting interface. SPEED PARAM:Press this key to enter the interface for setting speed parameters. TIME PARAM:Press this key to enter the screen for setting time parameters. ENGINEER PARAM:Press this key to enter the correct password. The page for setting engineer parameters is displayed. SYSTEM SET:Press this key to enter the correct password. TEST:Press this key to enter the manual test interface. WATCH:Press this key to enter the monitoring screen.
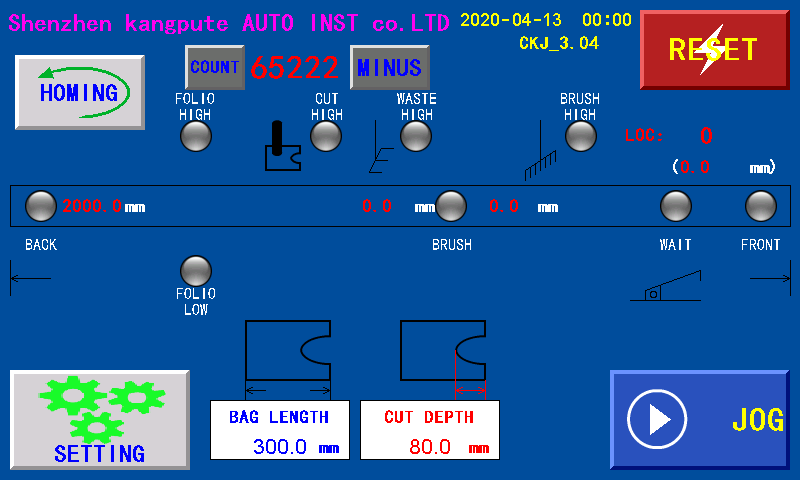
SAVE DATA:Click this key to save the set value. III. Home 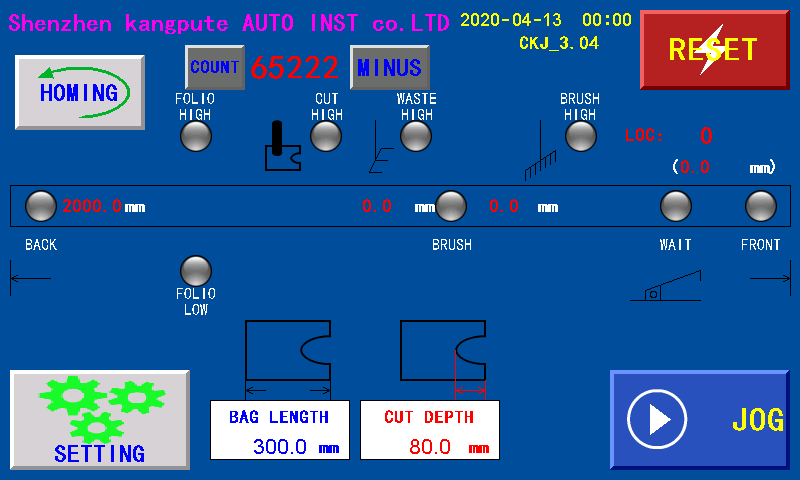 LEN SET:Shows the set length for bag-making, in mm CUT DEPTH:Shows the punching depth of the bag, in mm COUNT:When the total number of a batch reaches the end of a batch, the number automatically returns to zero; Press "Count/clear" to clear the number. MINUS:Click this key to decrease the value by 1. HOMING:Click this button to return the manipulator to standby position. RESET:When the system can not work normally, press this key to restart the program, can also be used for emergency shutdown. JOG/AUTO:JOG:In manual mode, perform a manual test. AUTO:In automatic state, the machine starts to run when the bagging signal is encountered.
IV. LENGTH SET 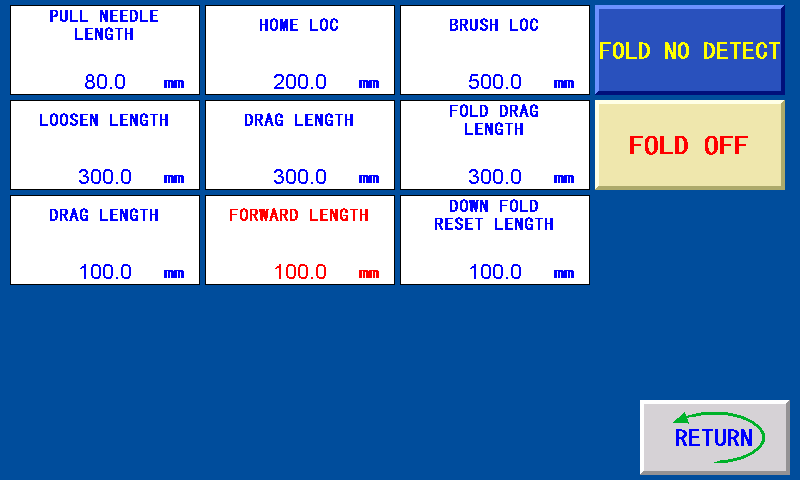 PULL NEEDLE LENGTH:When the manipulator moves from the forward length position to the punching position, the needle pulling signal is closed after the needle pulling length. HOME LOC:Normal operation, manipulator waiting position. BRUSH LOC:When the manipulator moves to the cutting position, it passes through the position of the brush material, and the brush material signal output. LOOSEN LENGTH:Manipulator after clamping, back to loosen the length of the material. DRAG LENGTH:The length of the manipulator back feeding. FOLD DRAG LENGTH:After the output of the upper and lower folding signals, the manipulator backs up the feeding length. Press back LENGTH:Manipulator in punching cutting position back through the length of the waste press back, the waste press signal closed. FORWARD LENGTH:When running, when encountering the bagging signal, the manipulator moves forward from the standby position. DOWN FOLD RESET LENGTH:After the manipulator is folded in half, the folding signal is closed when the length is backward. FOLD NO DETECT/FOLD DETECT: FOLD NO DETECT:When there is no upper folding high position and lower folding low hall, there is no need for folding detection and folding action. FOLD DETECT:When there are upper fold high and lower fold low hall, it must be switched to fold detection. FOLD OFF/FOLD ON: FOLD OFF:The machine does not fold in half. FOLD ON:When folding detection, the machine can be folded in half. V. SPEED PARAM  MATERIAL SPEED:When the manipulator clamps the material, the acceleration and deceleration time of the servo (stepper) motor, the larger the setting, the faster the servo (stepper) motor starts. NO MATERIAL SPEED:Manipulator is not clamping, servo (stepper) motor acceleration and deceleration time, the greater the setting, servo (stepper) motor start faster. TOP FREQ:The maximum speed of the manipulator servo (stepper) motor, the larger the setting, the faster the speed of the servo (stepper) motor. ACC TIME:1~9, stepper motor default 1, servo motor default 6 VI. TIME PARAM 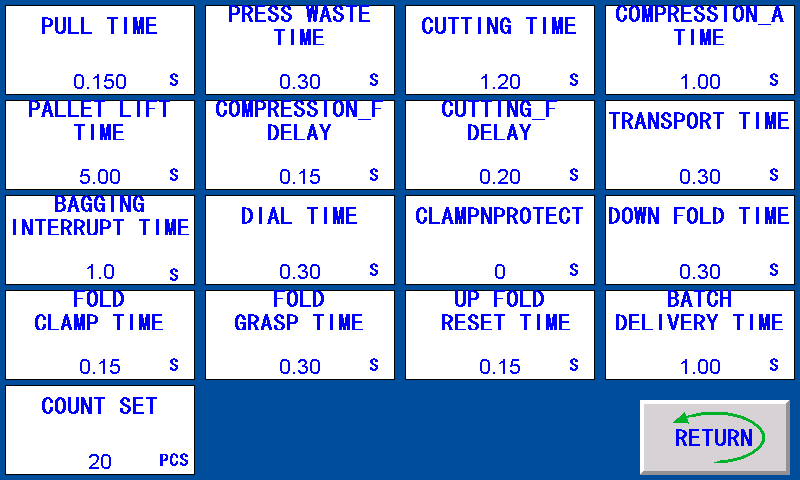
PULL TIME:After the forward distance of the manipulator, the needle pulling signal outputs the time of needle pulling and the manipulator moves to the punching and cutting position. PRESS WASTE TIME:When the manipulator reaches the punching position, the pressing waste signal outputs the pressing waste time. CUTTING TIME:After pressing waste output time, punching signal output punching time. COMPRESSION_A TIME:After punching output time, pressure A signal output time after closing pressure signal. PALLET LIFT TIME:The time of lifting output on the pallet. COMPRESSION_F DELAY:After the pressurized A signal is closed, the blanking signal is closed after the time delay. CUTTING_F DELAY:After the blanking signal is off, fold in half or drag backward after the time delay. TRANSPORT TIME:The manipulator clips the material to the conveyor belt, conveying signal output time. BAGGING INTERRUPT TIME:Bagging is temporarily closed for a time. DOWN FOLD TIME:When the manipulator moves to the folding position, the next folding signal outputs the time. FOLD CLAMP TIME:The time when the manipulator clamp is opened after the output time of the next halffold signal. FOLD GRASP TIME:The manipulator moves back and then forward to the position of folding and grasping, closing the time of clamping signal output. UP FOLD RESET TIME:After the upper folding signal is closed and the time is delayed, the manipulator moves back to loosen the material. BATCH DELIVERY TIME:The output time of the transmission signal upon arrival of a batch. OPEN CLAMP PROTECT TIME:During operation, the machine will stop after the clamp has been opened for longer than the protection time.
COUNT SET:A set number of 5 alarm in advance. Units: a VII. TEST 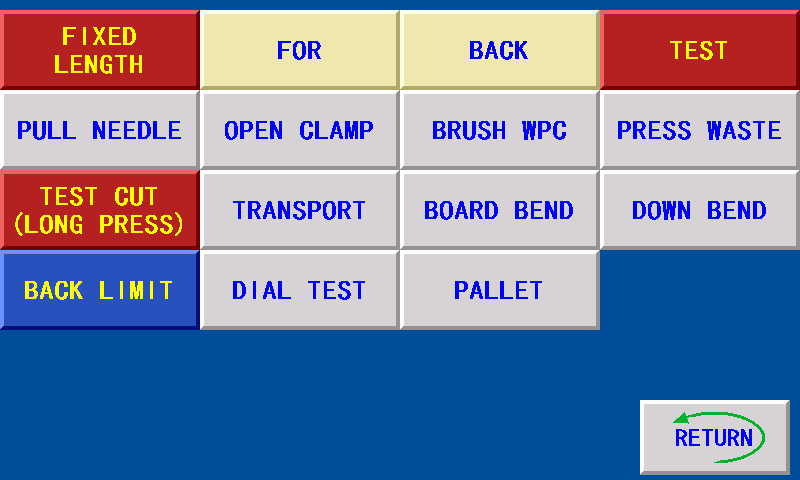 FIXED LENGTH:Click this key, the manipulator moves to the front limit first, then moves back to the front limit, and calculates the number of pulses before and after the limit. Finally, it returns to standby position after cutting protection position. FOR:In manual state, the manual servo (step) manipulator moves forward. BACK:In the manual state, the manual servo (step) manipulator moves backward. TEST:Long press this key, the machine for a whole work. BACK LIMIT:Click this key to move the manipulator backward. TEST CUT (LONG PRESS):Long press this key to enter the punching test interface. Note: Manual test signal output, manipulator should be in the rear limit.
VIII. Outer accessory 1.Hall Switches:red +12V;black GND;yellow input signal 2.Color photoelectric:red +12V;black GND;white or green input signal
3.Buzzer:red +12V;black The buzzer signal input output 01, +24V 01,0V 02, -24V 02,+5V 03,RX+ 03,M01 Main analog 04,RX- 04,M02 Discharge analog 05,TX+ 05,M03 Discharge 2 analog 06,TX- 06,M04 Out analog 07,0V 07,+24V
01,+24V 01,0V 02,X01 Feeding 02,Y01 (CP-)pulse 03,X02 FEED FORWARD 03,Y02 (CP+)pulse 04,X03 04,Y03 (CW1)direction 05,X04 PROTECT 05,Y04 BAG (0V) 06,X05 AFTER LIMIT 06,Y05 CONVEY (0V) 07,X06 BRUSH HIGH 07,Y06 PULL (0V) 08,X07 WASTE HIGH 08,Y07 OPEN CLAMP (0V) 09,X08 CUT HIGH 09,Y08 BRUSH (0V) 10,0V 10,+24V
01,+24V 01,0V 02,X09 FOLD HIGH 02,Y09 WASTE (0V) 03,X10 FOLD LOW 03,Y10 CUT (0V) 04,X11 ERROR 04,Y11 INFLATE (0V) 05,X12 ADVANCE 05,Y12 UP FOLD (0V) 06,X13 DRAG 06,Y13 DOWN FOLD (0V) 07,X14 07,Y14 TURN TABLE (0V) 08,X15 08,Y15 PALLET (0V) 09,X16 RESET 09,Y16 BEEP (0V) 10,0V 10,+24V
|